Zadanie 3.1.1.5
Wskazówka teoretyczna
W inercjalnym układzie odniesienia, jeśli na ciało nie działa żadna siła lub siły działające równoważą się, to ciało pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym.
Zgodnie z I zasadą dynamiki, suma sił działających na układ musi wynosić zero.
II zasada dynamiki
Jeśli siły działające na ciało nie równoważą się, to ciało porusza się z przyspieszeniem wprost proporcjonalnym do siły wypadkowej, a odwrotnie proporcjonalnym do masy ciała. \[ \vec{a} = \frac{ \sum \vec{F}_{w} } {m} \left[ \frac{m}{s^2} = \frac{N}{kg} \right] \]
III zasada dynamiki
Jeśli ciało \(A\) działa na ciało \(B\) pewną siłą (siłą akcji), to ciało \(B\) działa na ciało \(A\) siłą (siłą reakcji) o takiej samej wartości i kierunku, lecz przeciwnym zwrocie. \[ \vec{F}_{AB} = -\vec{F}_{BA} \]
Informacja
Postaraj się samodzielnie rozwiązać zadanie. Możesz sprawdzić swój tok rozumowania, klikając w przyciski odsłaniające kolejne etapy proponowanego rozwiązania lub sprawdź od razu odpowiedź.
Dane i szukane
Dane:
- masa ciała \(m\),
- kąt nachylenia równi \(\alpha\),
- współczynnik tarcia kinetycznego \(\mu\),
- przyspieszenie ziemskie \(g\).
Szukane:
- kąt nachylenia sznurka, w stosunku do powierzchni równi, w momencie najmniejszego jego naciągu \(\beta\).
Analiza sytuacji
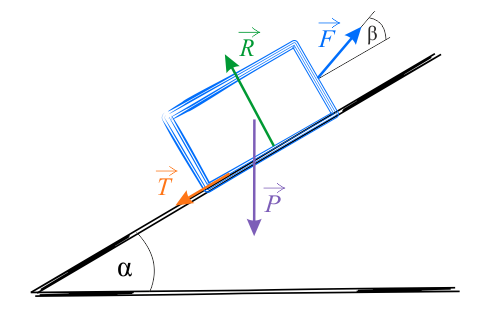
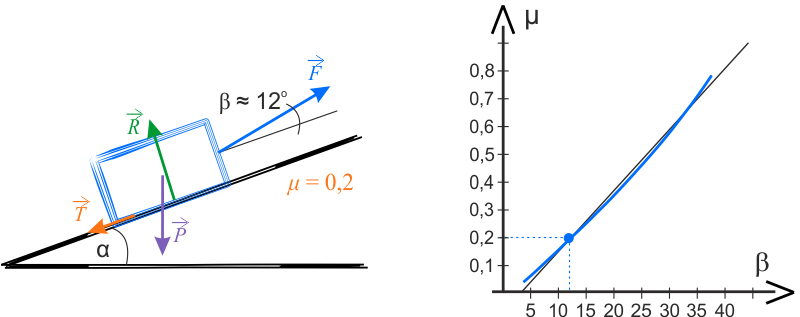
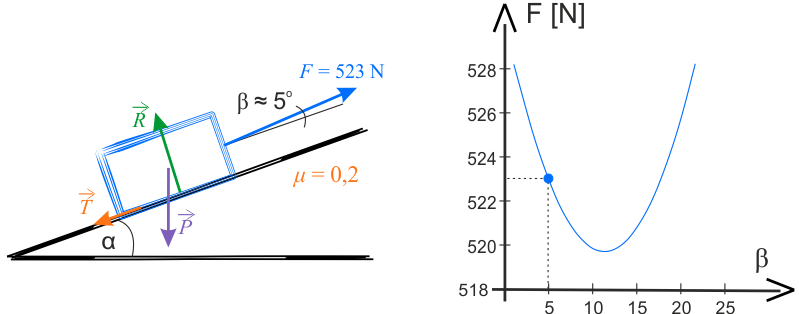
Na skrzynię, ciągniętą po rampie, działają następujące siły:
- siła ciężkości \(\vec{P}\), skierowana pionowo w dół i o wartości \(mg\),
- siła reakcji \(\vec{R}\), skierowana do góry w kierunku prostopadłym do rampy,
- siła wynikająca z tarcia kinetycznego \(\vec{T}\), działająca wzdłuż rampy w kierunku przeciwnym do kierunku prędkości,
- siła ciągnąca \(\vec{F}\), skierowana pod kątem \(\beta\) do płaszczyzny równi.
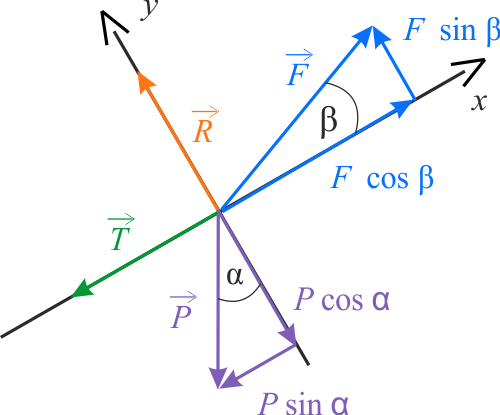
Obrócenie układu współrzędnych tak, aby siła \(\vec{R}\) była równoległa do osi \(OY\), a \(\vec{T}\) do osi \(OX\) powoduje, że nie trzeba ich rozkładać na składowe. Skutkiem tego, nieznane siły nie pojawią się w obu wzorach jednocześnie, co ułatwi rozwiązanie zadania.
Rozwiązanie - krok 1
Z I zasady dynamiki Newtona wiemy, że w celu uzyskania stałej prędkości skrzyni, siły na nią działające muszą być w równowadze. Wobec tego równania równowagi dla układu będą wyglądały następująco: \[ \eqalign{ \sum F_x &= F \cos\beta - P \sin\alpha - T = 0 \\ \sum F_y &= R + F \sin\beta - P \cos\alpha = 0 } \] Siła tarcia kinetycznego jest zależna od nacisku skrzyni na powierzchnię rampy i wynosi \(T=\mu N\), gdzie \(N\) oznacza siłę nacisku. Z III zasady dynamiki wiemy, że siła reakcji \(R\) jest, co do wartości, równa sile nacisku \(N\), czyli \(R=N\). Można więc zapisać, że \(T=\mu R\). Uwzględniając ten fakt oraz zależność \(P=mg\) w układzie równań uzyskujemy: \[ \eqalign{ F \cos\beta - mg\,\sin\alpha - \mu R = 0 \\ R + F \sin\beta - mg\ \cos\alpha = 0 } \] W powyższych dwóch równaniach mamy dwie niewiadome (\(F\) i \(R\)), więc układ równań jest rozwiązywalny.
Przekształcając drugie równanie, uzyskujemy wzór na siłę reakcji: \[ R = mg\ \cos\alpha - F \sin\beta \]
Teraz siłę reakcji podstawiamy do równania pierwszego i otrzymujemy \[F\cos\beta-mg\sin\alpha-\mu (mg\cos\alpha-F\sin\beta)=0\]
Otrzymane równanie przekształćmy w taki sposób, aby otrzymać zależność \(F(\beta)\).
\[F\cos\beta-mg\sin\alpha-\mu\,mg\cos\alpha+\mu\,F\sin\beta=0\] \[ F\left (\cos\beta+\mu\sin\beta \right )= mg\sin\alpha+\mu\,mg\cos\alpha \]
Rozwiązanie - krok 2
Wyznaczenie najmniejszego naciągu, wymaga obliczenia pochodnej z funkcji określającej siłę naciągu i przyrównanie jej do zera. W celu ułatwienia liczenia pochodnej, zapiszmy otrzymany wzór w postaci:
Rozwiązanie - krok 3
Kolejnym krokiem jest wyznaczenie, dla jakiego kąta \(\beta\), otrzymane równanie, przyjmuje wartość zero.
Pochodna funkcji \(F(\beta)\) przyjmuje wartość zerową dla
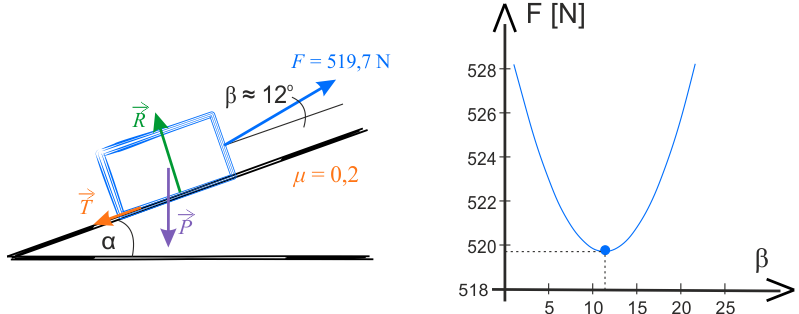
Siła ciągnąca będzie miała najmniejszą wartość, gdy \(\displaystyle{\mu=\operatorname{tg}{\beta} }\).
Odpowiedź
Siła ciągnąca będzie miała najmniejszą wartość, gdy \(\displaystyle{\mu=\operatorname{tg}{\beta} }\).
Informacja
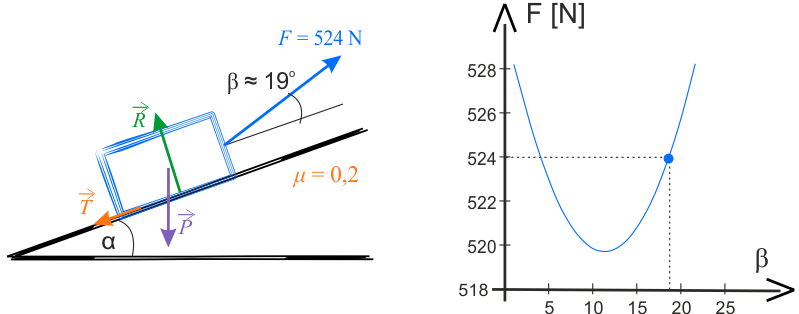
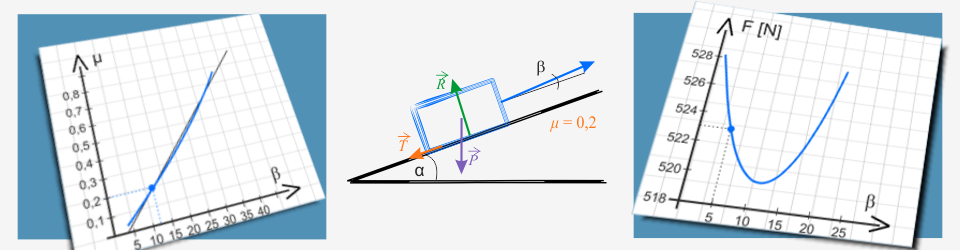
Pod rysunkami znajdują się strzałki. Po wciśnięciu szarego przycisku ze strzałką zobaczysz następne wykresy.
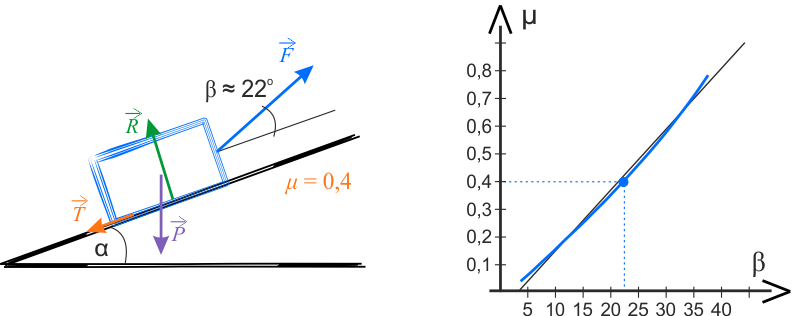
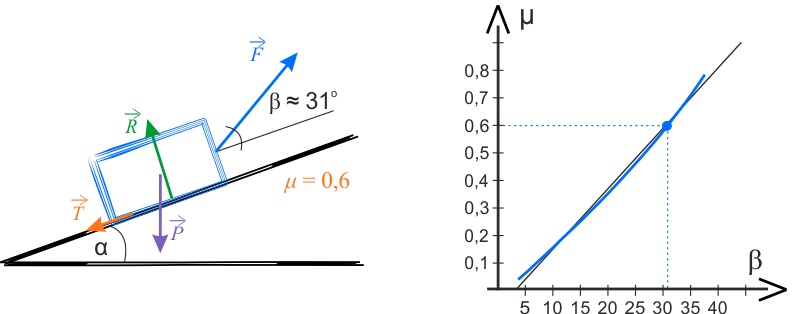
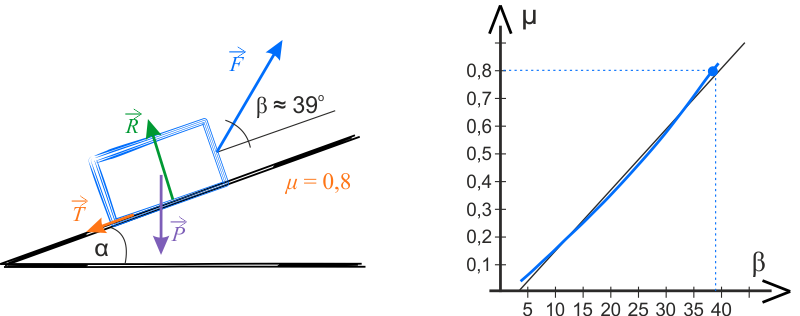
Na wykresie poniżej przedstawiono zależność \(\mu(\beta)=\operatorname{tg}{\beta}\) (niebieska krzywa) oraz ilustrację graficzną, prezentującą sposób nachylenia sznura.
Na wykresie znajduje się również linia prosta, służąca do przedstawienia krzywizny analizowanej funkcji.