Zadanie 1.4.2.3
Wskazówka teoretyczna
Zwrot wektora będącego wynikiem iloczynu wektorowego określa kierunek ruchu śruby prawoskrętnej w trakcie nakładania pierwszego z wektorów iloczynu, na drugi. Zmiana kolejności nakładania wektorów oznacza zmianę znaku iloczynu wektorowego.
Informacja
Możesz zobaczyć odpowiedź, klikając w przycisk "Odpowiedź" lub sprawdzać kolejne etapy rozwiązania, wybierając prawidłowe odpowiedzi. W rozwiązaniu znajdziesz wskazówki, obliczenia i objaśnienia.
Dane i szukane
Dane:
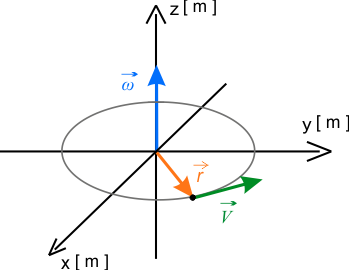
- współrzędne wektora prędkości kątowej \(\vec{\omega}=\frac{3}{4}\pi\, \hat{k}\),
- współrzędne wektora wodzącego \(\vec{r}=3\,\hat{i}+4\,\hat{j}\).
Szukane:
- współrzędne wektora prędkości liniowej \(\vec{V}\).
Odpowiedź
Współrzędne wektora prędkości liniowej wynoszą \(\displaystyle{\vec{v}=(-3 \pi\,\hat{i}+2,25\pi\,\hat{j})\;\mathrm{\frac{m}{s}}}\).
Polecenie
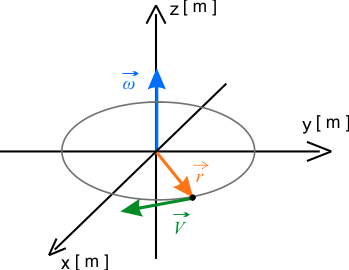
Wybierz jeden z dwóch rysunek, który poprawnie przedstawia sytuacje opisaną w zadaniu.
Polecenie
Wskaż, wśród trzech, jeden prawidłowo wyznaczony wektor prędkości liniowej.
Rozwiązanie
\(\displaystyle{\vec{v}=\vec{\omega}\times\vec{r}=(0\cdot 0-\frac{3}{4}\pi\cdot4)\hat{i}+(\frac{3}{4}\pi\cdot3-0\cdot0)\hat{j}+(0\cdot4-0\cdot3)\hat{k}}\)
\(\displaystyle{\vec{v}=(-3\pi\,\hat{i}+\frac{9}{4}\pi\,\hat{j})\;\mathrm{\frac{m}{s}}}\)
Odpowiedź
Współrzędne wektora prędkości liniowej wynoszą \(\displaystyle{\vec{v}=(-3 \pi\,\hat{i}+2,25\pi\,\hat{j})\;\mathrm{\frac{m}{s}}}\).