Zadanie 2.4.2.5
Informacja
Możesz zobaczyć odpowiedź, klikając w przycisk "Odpowiedź" lub sprawdzać kolejne etapy rozwiązania, wybierając prawidłowe odpowiedzi. W rozwiązaniu znajdziesz wskazówki, obliczenia i objaśnienia.
Dane i szukane
Dane:
- promień koła \(R\),
- prędkość kątowa koła \(\omega\).
Szukane:
- Równanie ruchu Kinematysława,
- zależność od czasu wektora prędkości \(\vec{v}(t)\),
- składowe wektora prędkości \(v_r\), \(v_{\varphi}\),
- zależność od czasu wektora przyspieszenia \(\vec{a}(t)\),
- składowe wektora przyspieszenia \(a_r\), \(a_{\varphi}\), \(a_n\), \(a_s\).
Odpowiedź
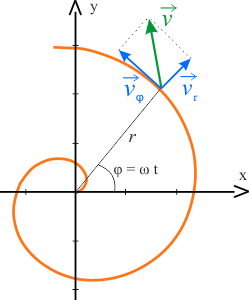
Zależność od czasu wektora prędkości wynosi \(\displaystyle{v(t)=v_0\sqrt{1+\omega^2t^2}}\), a jego składowe można zapisać w postaci \(v_r=v_0\) oraz \(v_{\varphi}=\omega v_0t\).
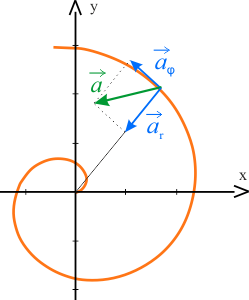
Zależność od czasu wektora przyspieszenia wynosi \(\displaystyle{a(t)=v_0\omega \sqrt{t^2\omega^2+4}}\).
Składowa radialna i transwersalna wektora przyspieszenia wynoszą: \(a_r=v_0\,t\,\omega^2\) oraz \(a_{\varphi}=2\omega v_0\).
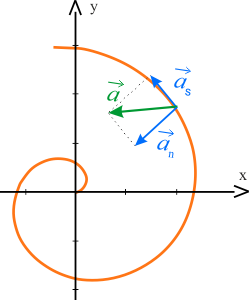
Składowa styczna i normalna wektora przyspieszenia wynoszą: \(\displaystyle{a_n=\frac{v_0\omega(\omega^2t^2+2)}{\sqrt{1+\omega^2t^2}}}\) oraz \(\displaystyle{a_s=\frac{v_0\,\omega^2t}{\sqrt{1+\omega^2t^2}}}\).
Polecenie
Jak wyglądał tor ruchu według Kinematysława, a jak według Fizaliusza stojącego na zewnątrz? Wybierz prawidłową odpowiedź, z czterech przedstawionych poniżej.
Kinematysław porusza się ruchem jednostajnym prostoliniowym, natomiast Fizaliusz obserwuje tor ruchu opisany elipsą.
Kinematysław porusza się ruchem jednostajnym prostoliniowym, natomiast Fizaliusz obserwuje tor ruchu opisany cykloidą.
Rozwiązanie
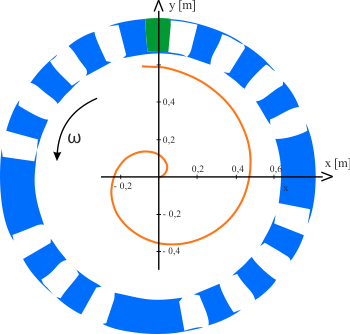
W układzie odniesienia związanym z wirującym kołem, czyli z punktu widzenia Kinematysława, porusza on się wzdłuż promienia - ruch prostoliniowy jednostajny ze stałą prędkością. W układzie odniesienia związanym z nieruchomym Fizaliuszem, Kinematysław porusza się po spirali.
W celu wyznaczenia kształtu spirali posłużymy się układem biegunowym. W układzie tym równania ruchu wyrażone są przy pomocy współrzędnej radialnej \(r\) i kątowej \(\varphi\). Prędkość poruszania się obiektu wzdłuż promienia jest stała i wynosi \(v_0\), więc:
W chwili początkowej \(t=0\) oraz wartość kąta wynosi zero. Koło obraca się ze stałą prędkością kątową \(\omega\) więc kąt zmienia się z czasem następująco:
Dwa powyższe równania przekształcamy tak, aby wyznaczyć czas: \(\displaystyle{t=\frac{r}{v_0}}\) oraz \(\displaystyle{t=\frac{\varphi}{\omega}}\).
Po przyrównaniu obu równań otrzymujemy równanie ruchu zapisane we współrzędnych biegunowych.
Otrzymana zależność opisuje Spirala Archimedesa - dwuwymiarowa krzywa o równaniu we współrzędnych biegunowych: \(r=s\cdot \varphi\), gdzie \(r\) - promień, \(s\) - parametr, \(\varphi\) - kąt. .
Polecenie
Wyznacz zależność od czasu wektora prędkości oraz jego składowych radialnej i transwersalnej. Wybierz jeden zestaw prawidłowych odpowiedzi, wśród dwóch zaproponowanych poniżej.
Rozwiązanie - prędkość
Na rysunku obok narysowano składowe wektora prędkości, wyznaczone w układzie biegunowym.
Z definicji składowe te wynoszą:
Równanie opisujące prędkość obiektu w zależności od czasu, wyznaczamy następująco:
Polecenie
Wyznacz zależność od czasu wektora przyspieszenia oraz jego składowych radialnej, transwersalnej, normalnej i stycznej. Wybierz jeden zestaw prawidłowych odpowiedzi, wśród dwóch zaproponowanych poniżej.
Rozwiązanie - przyspieszenie we współrzędnych biegunowych
Całkowite przyspieszenie we współrzędnych biegunowych można rozłożyć na składowe radialną i transwersalną. Na podstawie definicji mamy:
Wartość całkowitego przyspieszenia wyznaczamy następująco:
\(\displaystyle{a=\sqrt{v_0^2t^2\omega^4+4v_0^2\omega^2}}\)
Rozwiązanie - przyspieszenie styczne i normalne
Otrzymaną wartość całkowitą przyspieszenia, można również rozłożyć na składową normalną i styczną. Wartość składowej stycznej przyspieszenia \(a_s\) w chwili czasu \(t\) dana jest wzorem:
Przyspieszenie całkowite można zapisać w postaci;
\(\displaystyle{a_n=\sqrt{\frac{v_0^2\omega^2(\omega^2t^2+2)^2}{1+\omega^2t^2}}}\)
\(\displaystyle{a_n=\frac{v_0\omega(\omega^2t^2+2)}{\sqrt{1+\omega^2t^2}}}\)
Odpowiedź
Zależność od czasu wektora prędkości wynosi \(\displaystyle{v(t)=v_0\sqrt{1+\omega^2t^2}}\), a jego składowe można zapisać w postaci \(v_r=v_0\) oraz \(v_{\varphi}=\omega v_0t\).
Zależność od czasu wektora przyspieszenia wynosi \(\displaystyle{a(t)=v_0\omega \sqrt{t^2\omega^2+4}}\).
Składowa radialna i transwersalna wektora przyspieszenia wynoszą: \(a_r=v_0\,t\,\omega^2\) oraz \(a_{\varphi}=2\omega v_0\).
Składowa styczna i normalna wektora przyspieszenia wynoszą: \(\displaystyle{a_n=\frac{v_0\omega(\omega^2t^2+2)}{\sqrt{1+\omega^2t^2}}}\) oraz \(\displaystyle{a_s=\frac{v_0\,\omega^2t}{\sqrt{1+\omega^2t^2}}}\).