Zadanie 5.1.1.2
Wskazówka teoretyczna
gdzie \(m_i\) i \(\vec{r}_i\) to odpowiednio masa i wektor położenia i-tego punktu materialnego, a \(M\) jest masą całego układu.
Powyższą definicję możemy odnieść do ciał o skończonych rozmiarach pod warunkiem, że ciało podzielimy na bardzo małe (w porównaniu z rozmiarami ciała) obszary, które będziemy traktowali, jako punkty mające masę tego obszaru. Można pokazać, że środek mas ciał symetrycznych leży na osiach lub w środku symetrii – np. środek masy jednorodnej kuli leży w środku kuli, środek masy jednorodnej belki leży w środku jej długości itp. Jeżeli, z czym często spotykamy się w zadaniach, mamy układ ciał o skończonych rozmiarach, to środek masy tego całego układu wyznaczamy, traktując ciała układu jako punkty materialne, znajdujące się w położeniach ich środków mas.
Komentarz: Środek masy ciała może leżeć poza ciałem, np. środek masy jednorodnego pierścienia będzie położony w jego środku.
Informacja
Postaraj się samodzielnie rozwiązać zadanie. Możesz sprawdzić swój tok rozumowania, klikając w przyciski odsłaniające kolejne etapy proponowanego rozwiązania lub sprawdź od razu odpowiedź.
Dane i szukane
Dane:
- masa pierwszego ciała \(m_1=4\,\mathrm{kg }\),
- masa drugiego ciała \(m_2=8\,\mathrm{kg }\),
- masa trzeciego ciała \(m_3=4\,\mathrm{kg }\)
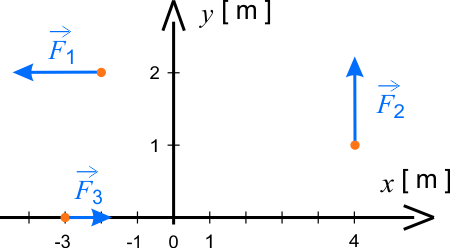
- położenia kolejno trzech ciał w chwili \(t=0\): \((-2,2)\,\mathrm{m}\), \((4,1)\,\mathrm{m}\) oraz \((-3,0)\,\mathrm{m}\),
- siła działająca na pierwsze ciało \(\vec{F}_1=-F_1\,\hat{x}\), \(F_1=16\,\mathrm{N}\),
- siła działająca na drugie ciało \(\vec{F}_2=F_2\,\hat{y}\), \(F_2=16\,\mathrm{N}\),
- siła działająca na trzecie ciało \(\vec{F}_3=F_3\,\hat{x}\), \(F_3=8\,\mathrm{N}\).
Szukane:
- położenie środka masy w chwili \(t=2\,\mathrm{s}\): \(r_s\).
Analiza sytuacji
Na rysunku przedstawiono siły działające na trzy ciał w chwili \(t=0\).
Wektor położenia środka masy układu ciał w chwili \(t=0\), zgodnie z definicją, wynosi
gdzie \(\vec{r}_{01}\), \(\vec{r}_{02}\), \(\vec{r}_{03}\) oznaczają wektory położenia ciała w chwili \(t=0\), a \(m=m_1+m_2+m_3\) jest masą układu trzech ciał.
Jeżeli w chwili początkowej ciała były w spoczynku, to również środek masy był w spoczynku. Ruch środka masy odbywa się pod wpływem siły \(\vec{F}\), która jest sumą sił działających na wszystkie ciała układu.
Pod wpływem tej siły \(\vec{F}\) środek masy uzyskuje przyspieszenie \(\vec{a}_s\) zgodnie ze wzorem:
który jest równaniem ruchu środka masy danego układu punktów. Z powyższej zależności obliczymy \(\vec{a}_s\).
Prędkość środka masy obliczamy z równania \(\displaystyle{\vec{v}_s=\int \vec{a}_s\mathrm{d}t }\), a położenie środka masy \(\displaystyle{\vec{r}_s=\int \vec{v}_s\mathrm{d}t }\).
Rozwiązanie - obliczenia
Wektor położenia środka masy układu ciał w chwili \(t=0\) wynosi
- współrzędna \(x\)-owa: \(\displaystyle{\vec{r}_{0sx}=\frac{4\cdot (-2)+8\cdot 4+4\cdot (-3)}{4+8+4}=\frac{3}{4} }\)
- współrzędna \(y\)-owa: \(\displaystyle{\vec{r}_{0sy}=\frac{4\cdot 2 +8\cdot 1+4\cdot 0}{4+8+4}=1 }\)
Siła, pod wpływem której środek masy uzyskuje przyspieszenie, wynosi:
Przyspieszenie środka masy wynosi
Prędkość środka masy w chwili \(t\) wynosi
- współrzędna \(x\)-owa: \(\displaystyle{\vec{v}_{sx}=\int \left ( -\frac{1}{2}\right )\, \mathrm{d}t=-\frac{1}{2}t }\)
- współrzędna \(y\)-owa: \(\displaystyle{\vec{v}_{sy}=\int 1\,\mathrm{d}t=t }\)
gdzie \(\vec{C}_1\) jest stałą (wektorową) całkowania. Stałą tą wyznaczymy z warunku takiego, że w chwili \(t=0\) prędkość środka masy wynosi zero.
Położenie środka masy układu dane jest przez wektor wodzący środka masy
gdzie stałą \(\vec{C}_2\), podobnie jak poprzednio, wyznaczymy z warunku początkowego.
Położenie środka masy w chwili \(t=2\,\mathrm{s}\) wynosi
Odpowiedź
Położenie środka masy w chwili \(t=2\,\mathrm{s}\) wynosi \(\displaystyle{\vec{r}_s=\left (-\frac{1}{4},3\right )\,\mathrm{m} }\).