Niech \(\alpha\) będzie miarą łukową (wyrażoną w radianach) kąta uogólnionego skierowanego, którego pierwszym ramieniem (początkowym) jest oś \(OX\) a drugim ramieniem (końcowym) jest półprosta o początku w punkcie \(O(0,0)\) przechodząca przez punkt \(P(x,y),\) dla \((x, y )\neq (0,0).\)
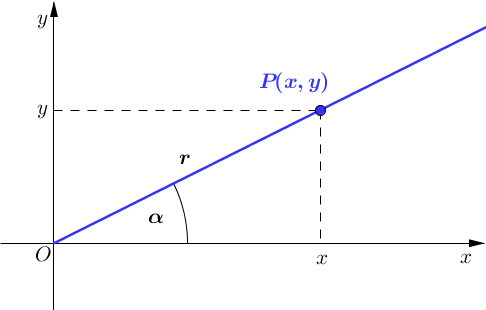
Przy takich oznaczeniach definiujemy wartości funkcji trygonometrycznych nastepująco:
\[\begin{array}{l}
\large{\sin \alpha =\displaystyle\frac{y}{r}}\\
\large{\cos \alpha = \displaystyle\frac{x}{r}}\\
\large{\operatorname{tg}{\alpha} =\displaystyle\frac{y}{x}}\\
\large{\operatorname{ctg}{\alpha}=\displaystyle\frac{x}{y}}.
\end{array}\]